|
by Dr Antony Anderson C.Eng FIEE 8. Automobile Cruise Control and Sudden Acceleration : Discussion The main failure modes for industrial electronic
control
systems such as P + I (Proportional + Integral)
controllers are fairly
well
established.
Because the technology used is the same, there is good
reason to
suppose
that the failure modes of automobile electronic control
systems will be
very similar. For example, with cruise control,
malfunctions may
arise if
a feedback sensor or one of the external switches used
to exercise
logical control and interlocking functions should go
open or short
circuit. But it is not only open or short circuits that
may cause
problems, but short-duration circuit intermittencies at
poor electrical
contacts. Microphonic noise in electrical
contacts
caused by vibration was well-known source of problems in
mechanical
automatic
telephone exchanges and was fully reported by Fairweather
in 1946 and 1953. NOTE1
Vibration-induced
intermittent contacts in low-current sensor circuits
in automobiles may make circuits sensor circuits very
noisy, but the average circuit parameters
may still remain within the bounds of "normal" for the
circuit
concerned. Consequently, the monitoring of circuit
impedances using
software to determine when they go outside pre-specified
ranges and can
be regarded as having gone open or short circuit is not
necessarily going to detect vibration-induced
intermittencies. Some
kinds of vibration-induced intermittencies in
acceleration and speed
sensors, for example, are unlikely to be detected and
will therefore
not necessarily be recorded as fault codes by on-board
diagnostic
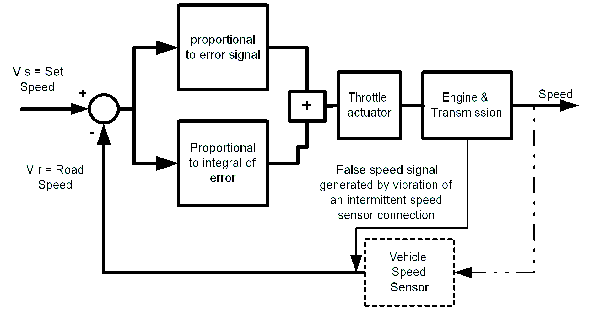
software. A paper presented by Anderson
at the 2007 IET Colloquium on Electromagnetic
Reliability shows
how an intermittent speed sensor connection can generate
a false speed
signal that may allow an automobile speed control system
to engage at
low speed. "Given a false speed
signal,
there appears to be no lower speed limitation on the
operation of the
speed control. It therefore becomes possible for the
system to "take
over" speed control from the driver in situations at low
speeds where,
previously, this might have been considered impossible.
All that seems
to be required is a single mechanically induced
intermittency in one of
the speed sensor connections. This appears to confirm
the suggestion in
the 1989 NHTSA Sudden Acceleration Report that 'Intermittent connections
in the speed
sensing circuitry or intermediate processing stages
could conceivably
generate electrical noise which could be interpreted
as a valid speed
signal above the minimum value so that if a driver
happened to bump the
set or resume controls the cruise control might engage
or "resume" to a
previously set speed even though the vehicle was
actually stopped or
going very slowly.' "
It is interesting to
note
that as long ago as 1975 a US
National Highways Traffic Safety Administration Report
on the potential
effects of EMI in automobiles recognised the inherent
difficulty in
preventing sudden accelerations from standstill and
suggested that the
most effective safety measure would be to keep the
speed control
electrically de-energised until normal speeds were
reached. This simple
preventive measure of not powering up the cruise
control when the
ignition is switched on is very rarely taken. As a
result, the
possibility of a false speed signal causing a sudden
acceleration
remains. However, there is convincing evidence that some potential modes of cruise control failure internal to the control unit could arise even if failure modes in the external circuitry had been anticipated and prevented. For example :
To explain sudden uncontrolled acceleration events in
terms of
rogue signals resulting from internal processes going on
within the
control unit, or intermittent contacts [or EMI or a
software glitch] is
quite as reasonable as
invoking malfunctioning external control logic or driver
error. It
would therefore be very unwise for the investigators of
possible
incidents of unexplained sudden acceleration to jump to
foregone
conclusions as to the likely causes. Rather,
investigators should carry
out a proper analysis of the many possible root causes
of failure and
seek to demonstrate which of these root causes may fit
most closely the
circumstances in a particular case. Once it is accepted that mechanisms exist that may cause intermittent failure modes to occur within the cruise control module, then it has to be granted that there is a possibility of a rogue control signal arising that may cause the electronic throttle control to move to the fully open position. This is a potentially dangerous situation because the control system is now in a state where inputs have ceased to determine the output. Switching the cruise control system off will not switch off power to the throttle actuator. Now the only way of closing the throttle is to remove the torque applied by electronic throttle actuator and allow the return spring to close it. This can only happen if the power supply to the electronic throttle actuator is removed or the mechanical link between the actuator and the throttle is disconnected. A design philosophy that forgets to provide protection
for the
power side of a control system and encourages the driver
to rely on the
brakes
and switching off the ignition system is, in my opinion,
manifestly
deficient and lacking in common sense and is
irresponsible. In this
case, the failure to
provide a means of electrical isolation for a
malfunctioning electronic
throttle actuator consuming a few watts may lead to a
sudden
uncontrolled acceleration in
a motor capable of delivering several hundred kilowatts.
To suggest
that
controlling sudden acceleration should be within the
power of the
driver
if he applies the brakes or switches off the
ignition seems
highly
inappropriate when a small contact breaker and a push
button would
probably
do the job much more effectively and without risk. NOTE
2 Discussions on the subject of sudden acceleration from
standstill mention that such incidents appear to be
confined to
vehicles with automatic gearboxes and occur at or near
the moment
of gear engagement. The potential significance of
this
observation is however never made clear. What is never
discussed is the
possible role of the torque converter between the engine
and the
automatic transmission in making it very difficult to
stop the vehicle. If the engine speed and the
transmission speed are
widely different, as they would be under wide open
throttle conditions,
there will be a great deal of slip in the torque
converter, whose
characteristics are such that it will act as a sort of
extra gearbox
with anything up to an extra 2:1 reduction ratio.
This means that
there will be roughly twice the torque developed at the
road wheels for
a given engine torque that there would be if the drive
and transmission
sides of the torque converter were moving at the same
speed. In terms
of braking effort, the driver will have to exert twice
as much braking
force tas he would have to do if there was no slip in
the torque
converter. In my view, it is necessary to consider the implications of possible alternative rogue operating states of the cruise control system at the design stage and (1) build in protection to prevent such alternative states from occurring, as far as this is possible, (2) design in monitoring and control circuitry, where possible, to indicate changes of state if they should arise and (3) in the event of malfunction, to provide a means of disabling/decoupling the cruise control system electrically and mechanically. As a matter of last resort in an emergency, the driver should be provided with an unequivocal means of disabling the electronic throttle actuator and returning to manual control, either by electrical power isolation of the actuator or mechanical disconnection from the throttle, or both. Currently, cruise control systems are regarded as non safety critical because engagement and disengagement are presumed, in my opinion wrongly, to be under the control of the driver. The driver only operates on the logical inputs to the cruise control system and driver actions will therefore not necessarily have any effect on the output from a malfunctioning power stage. The driver cannot over-ride the malfunctioning control system, if its performance is being determined by an internal fault or a rogue signal, unless specific measures have been built in that allow the throttle actuator to be electrically de-energised or mechanically disconnected from the throttle in an emergency. Therefore key questions that should be asked of any particular cruise control system are (1) whether or not the possibility of rogue signals causing the throttle actuator to move has been fully taken into account and (2) whether, in that eventuality, unequivocal means have been provided to disable the actuator and return the throttle to manual control, either by electrical power isolation of the actuator or mechanical disconnection from the throttle, or both. The onus would appear to be on the manufacturers of
cruise control systems to demonstrate convincingly, in
the event of a
fault, or
combination of faults, either internal or external, that
their
particular
system will always degrade gracefully and safely,
in such a way
as
to minimise the risk to the vehicle, its passengers and
to third
parties.
The first necessity is to provide emergency power
isolation for the
electronic
throttle control valve, so that even if rogue signals
should cause the
electronic
throttle control to open the throttle the power side of
the cruise
control
system can always be switched off and isolated and
manual control
be
re-established.
|